Drone Power Distribution Board
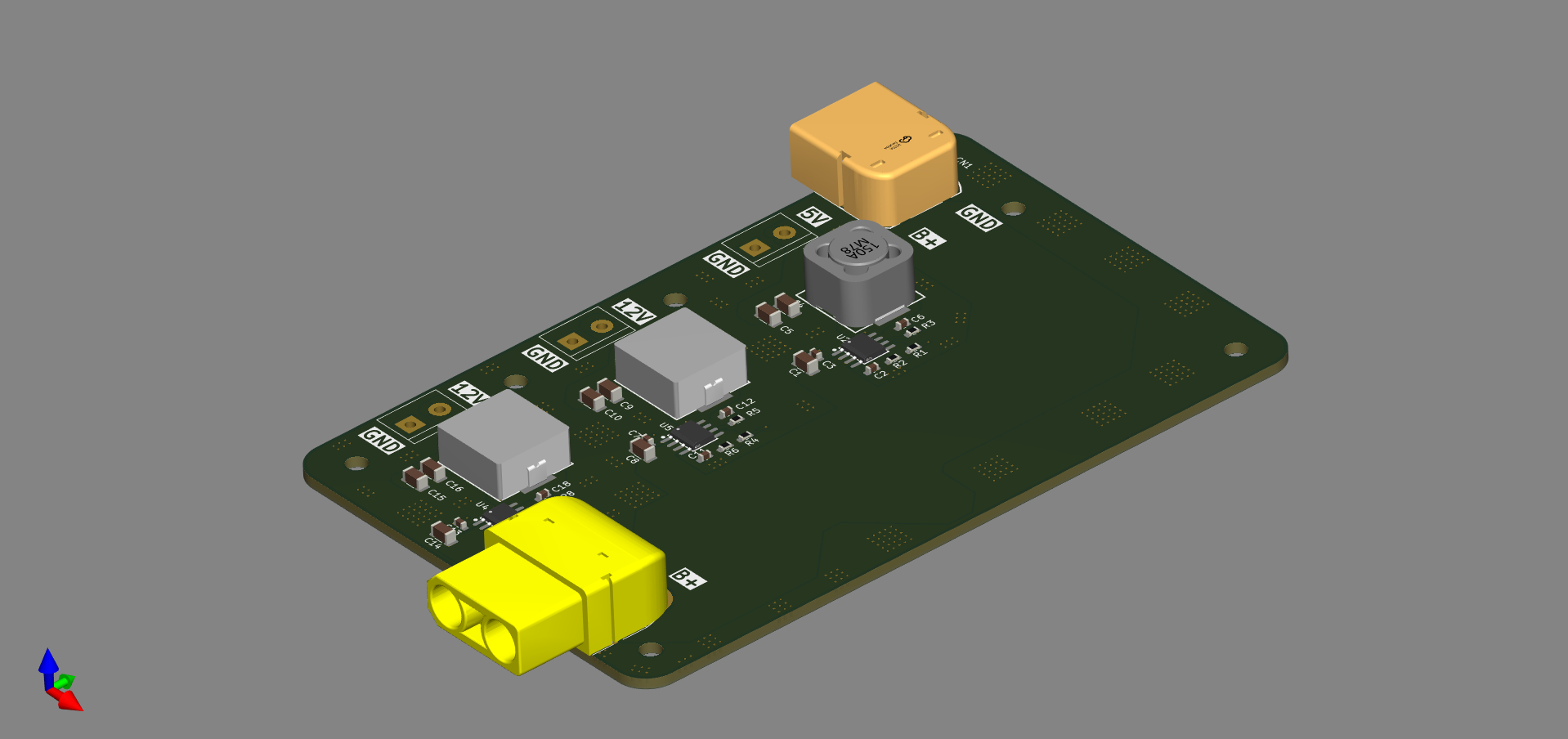
Overview Rather than using off-the-shelf PDB modules, this board was designed from scratch to meet the specific voltage and current requirements of the drone’s subsystems. The result is a tightly integrated power solution with three independently regulated rails. Date April 2026 My role Hardware Design PCB 2-Layer, KiCad Input LiPo/Li-ion via XT90 connector GitHub hardware-portfolio/DronePDB Features 3 Independent Buck Converters — Each designed to supply a specific voltage rail for the drone’s subsystems LiPo/Li-ion Input — Accepts direct battery input via XT90 connector Designed for the size and weight constraints typical of drone platforms Voltage Rails Rail Purpose Rail 1 Flight controller / compute Rail 2 Peripheral subsystems Rail 3 Sensors / low-power logic Hardware Highlights All three buck converter circuits designed from scratch — inductor sizing, feedback network, compensation network, and PCB layout — rather than using pre-built modules. Full control over efficiency, switching frequency, and output ripple. ...